Underdamped simple harmonic motion is a special case of damped simple harmonic motion
 |
(1)
|
in which
 |
(2)
|
Since we have
 |
(3)
|
it follows that the quantity
 |  |  |
(4)
|
 |  |  |
(5)
|
is positive. Plugging in the trial solution  to the differential equation then gives solutions that
satisfy
to the differential equation then gives solutions that
satisfy
 |
(6)
|
i.e., the solutions are of the form
 |
(7)
|
Using the Euler formula
 |
(8)
|
this can be rewritten
![x=e^(-(beta/2)t)[cos(gammat)+/-isin(gammat)].](/images/equations/UnderdampedSimpleHarmonicMotion/NumberedEquation7.svg) |
(9)
|
We are interested in the real solutions. Since we are dealing here with a linear homogeneous ODE, linear sums of linearly independent solutions are also solutions. Since we have a sum of such solutions in (9), it follows that the imaginary and real parts separately satisfy the ODE and are therefore the solutions we seek. The constant in front of the sine term is arbitrary, so we can identify the solutions as
 |  |  |
(10)
|
 |  |  |
(11)
|
so the general solution is
![x=e^(-(beta/2)t)[Acos(gammat)+Bsin(gammat)].](/images/equations/UnderdampedSimpleHarmonicMotion/NumberedEquation8.svg) |
(12)
|
The initial values are
 |  |  |
(13)
|
 |  |  |
(14)
|
so  and
and  can be expressed in terms of the initial conditions by
can be expressed in terms of the initial conditions by
 |  |  |
(15)
|
 |  |  |
(16)
|
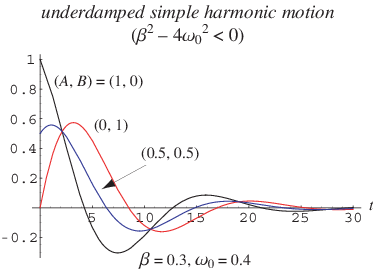
The above plot shows an underdamped simple harmonic oscillator with  ,
,  for a variety of initial conditions
for a variety of initial conditions  .
.
For a cosinusoidally forced underdamped oscillator with forcing function  , so
, so
 |
(17)
|
define
 |  |  |
(18)
|
 |  |  |
(19)
|
for convenience, and then note that
 |  |  |
(20)
|
 |  |  |
(21)
|
 |  |  |
(22)
|
 |  |  |
(23)
|
We can now use variation of parameters to obtain the particular solution as
 |
(24)
|
where
 |  |  |
(25)
|
 |  |  |
(26)
|
and the Wronskian is
 |  |  |
(27)
|
 |  |  |
(28)
|
These can be integrated directly to give
 |  |  |
(29)
|
 |  |  |
(30)
|
Therefore,
 |  | ![C((alpha^2+gamma^2-omega^2)cos(omegat)+2alphaomegasin(omegat))/([alpha^2+(gamma-omega)^2][alpha^2+(gamma+omega)^2])](/images/equations/UnderdampedSimpleHarmonicMotion/Inline70.svg) |
(31)
|
 |  |  |
(32)
|
where use has been made of the harmonic addition theorem and
 |
(33)
|