The word "rigid" has two different meaning when applied to a graph. Firstly, a rigid graph may refer to a graph having a graph automorphism group containing a single element. In this work, such a graph is instead referred to using the more common term "identity graph" (e.g., Albertson and Collins 1996).
The more common meaning of rigidity considers a graph's resistance to deformation, where graph edges are commonly taken as rigid straight bars or rods that are connected
to incident vertices via flexible hinges. (Other edge elements such as cables and
struts are sometimes also considered.) Rigidity of a framework  , i.e., a structure with vertex coordinates
, i.e., a structure with vertex coordinates  and underlying graph
and underlying graph  having vertex set
having vertex set  and edge set
and edge set  , can be thought of in two equivalent
ways: infinitesimal rigidity (which considers infinitesimal displacements corresponding
to velocity vectors) and static rigidity (which considers forces and loads on the
structure).
, can be thought of in two equivalent
ways: infinitesimal rigidity (which considers infinitesimal displacements corresponding
to velocity vectors) and static rigidity (which considers forces and loads on the
structure).
A framework consisting of bars is said to be (infinitesimally) rigid iff continuous motion of the points of the configuration
maintaining the bar constraints comes from a family of motions of all Euclidean
space which are distance-preserving. This is equivalent to the condition that
there exists an  such that every framework
such that every framework  which is equivalent to
which is equivalent to  and satisfies
and satisfies  for all
for all  is congruent to the framework
is congruent to the framework  .
.
A framework  is infinitesimally rigid iff the rank of its rigidity
matrix
is infinitesimally rigid iff the rank of its rigidity
matrix  satisfies
satisfies
 |
where  is the vertex count (Grasegger 2023).
is the vertex count (Grasegger 2023).
Call a framework  a generic realization of
a generic realization of  if the rigidity matrix
if the rigidity matrix  is equal to the rigidity matroid
is equal to the rigidity matroid  . This occurs when the coordinates of all points
. This occurs when the coordinates of all points  are algebraically independent over the field of rationals
are algebraically independent over the field of rationals
 . A graph (as an abstract object with
no explicit embedding) is said to be rigid iff there is a
generic realization for which the framework is generically rigid. Similarly, a graph
. A graph (as an abstract object with
no explicit embedding) is said to be rigid iff there is a
generic realization for which the framework is generically rigid. Similarly, a graph  is said to be (generically)
is said to be (generically)  -rigid if, for almost all (i.e., an open dense set of) configurations
of
-rigid if, for almost all (i.e., an open dense set of) configurations
of  , the framework
, the framework  is rigid in
is rigid in  .
.
A graph that is not rigid is said to be flexible (Maehara 1992).
Any embeding of the triangle graph  is rigid, while any embedding of the square
graph
is rigid, while any embedding of the square
graph  is flexible.
is flexible.
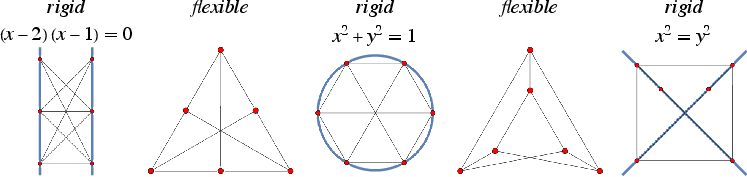
A flexible graph cannot have a rigid embedding. However, in general, a rigid graph may have both rigid and flexible embeddings. For
example, an embedding of the utility graph  in the plane is rigid unless its
six vertices lie on a conic (Bolker and Roth 1980,
Maehara 1992), some examples of which are illustrated above.
in the plane is rigid unless its
six vertices lie on a conic (Bolker and Roth 1980,
Maehara 1992), some examples of which are illustrated above.
Cauchy (1813) proved the rigidity theorem, one of the first results in rigidity theory. Although rigidity problems were of immense interest to engineers, intensive mathematical study of these types of problems has occurred only relatively recently (Connelly 1993, Graver et al. 1993).